Scientific Reports分享:软体假肢手对比刚性假肢手的优势
时间:2023-06-17 09:38:03来源:admin01栏目:假肢新闻 阅读:
手在人类生活中起着重要的作用,用于抓握、本体感受和交流。用假肢补偿失去的上肢精细协调功能是一项医学、技术、心理和社会挑战。尽管假肢开辟了恢复某些缺失功能的前景,但可用的商业设备与假肢用户的感知需求之间仍然存在很大差距。
当前的商业解决方案从简单的身体驱动系统到更先进的自供电刚性手,外观通常是拟人化的。前者是最典型的钩状抓手,使用肩带控制。后一组,也称为多关节手、多指手或仿生手,具有许多类似于人手的连杆和关节,尽管并非所有这些都可以由一个或多个电机独立驱动。有时它们包括弹性元件,例如弹簧,主要用于重新打开手。例如 Michelangelo hand、Bebionic hand、i-Limb hand、Taska hand、Mia hand 和 Vincent hand。最先进的手是“刚性的”,这意味着一旦电机的位置固定,所有连杆和关节的位置也固定。自供电假肢可以通过多种方式进行控制,从简单的开关到使用表面或植入式肌电传感器(EMG、IMES)和/或惯性测量单元(IMU)的更先进的技术。大多数肌电商用手仅使用 2 个 sEMG 传感器将假肢运动与用户的肌肉激活相关联,并通过切换不同的状态来选择抓握模式。就像人类改善他们的手以适应不同的任务要求(例如,戴手套以增加手部牵引力,或使用专门的工具),每种假肢技术都可能有利于特定活动的执行,并且可能会根据环境情况选择。由于其简单性和坚固性,挂钩非常适合精密抓握和粗糙环境。身体动力系统还提供有价值的感官反馈,这使得它们尽管简单但仍然有效。
这在 2016 年和 2020 年的 Cybathlon 比赛中得到了证实,两次动力臂假肢比赛均由身体动力装置(分别为 hook 和 hand)获胜。相比之下,肌电假肢不那么笨重,并提供更灵巧的功能,因此它们更适合轻型工作、办公室工作和社交郊游。不幸的是,单侧截肢者对上肢假肢的拒绝率很高,而且很大一部分用户主要依赖对侧肢体。虽然有几项研究使用日常使用时间作为成功的指标,但其他研究则侧重于其他因素,例如功能和患者满意度。初次使用假肢的结果并不直观,由专业临床医生进行的适当培训对于提高患者的接受度非常有价值。一项研究证明,充分的治疗训练可以显着提高效率和技能,同时使自发性更加平滑自发性(即在没有意识的情况下使用假肢)似乎与具身感有关,并且可能受系统的机械特性及其感知功能的影响。人工手的接受程度受许多方面的影响,但拒绝的重要原因是功能性和直观性差。在过去十年中,软机器人技术成为机械手设计的另一种方法,它有利于提高适应性和鲁棒性以及与人更好地进行交互操作。这些手由柔软的部分和灵活的关节组成,从生物学中汲取灵感,并超越了单纯的美学,促进了拟人化的特征。在人机交互领域,人们对这些技术的兴趣日益浓厚,但在假肢领域也正在兴起。软手的抓握模式是根据与物体和周围环境的接触而定义的。这一特性简化了系统控制,同时保持了先进的手动功能。尽管最先进的“软手”的力输出正在提高,但它们通常落后于刚性手,特别是对于连续软机器人设计。然而,在日常生活中的大多数常见活动中,物体的重量在1-2公斤左右,属于或接近可用高级软手施加的力范围。在我们的协议中,我们包含了不同权重的对象。尽管软机器人技术在假肢中的应用可能是有益的 ,但只有少数文献研究验证了软机器人与真实假肢使用者的关系。在本文中,我们探讨了在仿生肢体设计中使用软机器人技术对功能性和可用性的影响。我们假设 (a) 刚硬的手指更适合精确抓握,而柔软的手可能有利于适应性和在高级任务中更自然的使用,而 (b) 柔软的特性可能会导致更直观并促进在有限的时间内大量学习和 (c ) 增强用户体验感。
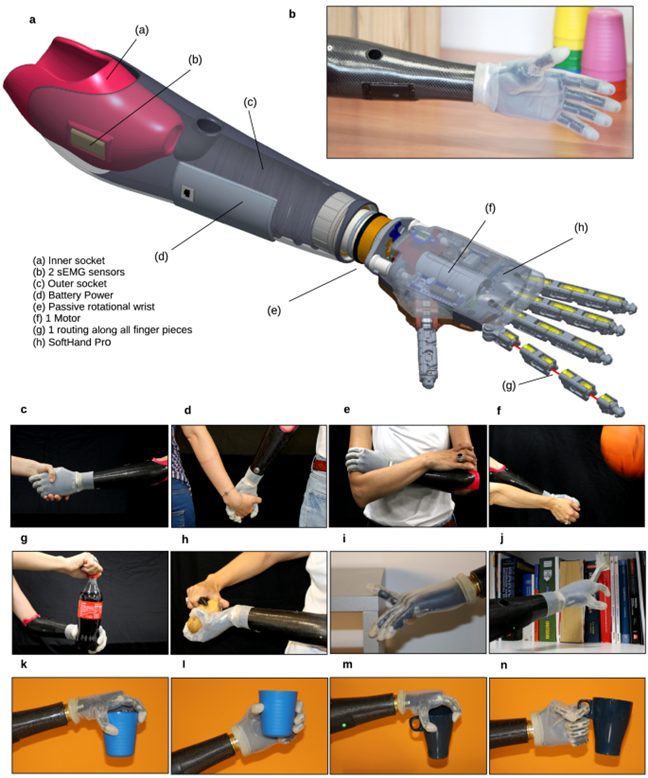
通过使用标准评估协议来衡量手部功能和用户感知,我们将一组假肢用户的体验与刚性和柔软多关节手的卓越示例进行了比较。对于刚性手组,我们使用了两种最先进的手,i-Limb 和 Bebionic 手,它们是市售的并经过广泛测试。由于没有市售的软假手,作为该组的代表,我们采用了我们实验室开发的先进研究原型 SoftHand Pro (SHP)(见图 1 和“材料和方法”部分)。这种选择的基本原理是 SHP 证明的高 TRL,它已在全球至少 10 个不同机构中对数十名患者进行了测试。
考虑到我们参与者的非专家肌电用户状况,我们研究了 (a) 操作熟练程度和 (b) 技术接受程度之间的关系,两种不同类型的手。作者认为,这项研究有助于理解特定设计原则对假肢使用和接受的几个方面的不同影响。在此过程中,论文方法还说明了培训在使用非常不同的假肢技术方面的作用。
功能评估为了评估这两个系统的性能和功能,我们考虑了 2 个标准评估,即 Box and Blocks 测试 (BBT) 和肌电控制能力评估 (ACMC)。图 2 报告了两种评估的数据和统计分析。图 2a 详细说明了来自 n 向方差分析测试的 BBT 统计结果,在所有研究的因素中都具有显着性,但重复和训练与设备之间的交互测试除外。参与者在 3 次重复中提高了他们的表现(第一次重复后 + 15.68%,图 2e)——因此,我们将重复视为 n 向方差分析测试中的一个因素。图 2b 显示了 BBT 的分数,包括每个受试者执行的 3 次重复的平均值及其在刚性和软系统训练前和训练后条件下的标准偏差。报告每个假手的组的平均值。在训练前和训练后,刚性商业手的得分分别为 11.47 ± 8.46 和 15.57 ± 7.70,而软手的得分分别为 9.8 ± 4.04 和 11.67 ± 5.31。图 2c-f 显示了研究不同方面的估计平均值和标准误差:训练效果、设备、重复之间的学习以及训练和所用设备之间的相互作用。在应用事后检验(“材料和方法”部分的详细信息)来证明一个因素内部各方面之间的差异后,图 2c 证明了治疗培训的好处,这使参与者的表现提高了 28.6%。图 2d 显示了 BBT 刚性设备的更好结果,而软手的性能下降了 20.93%。
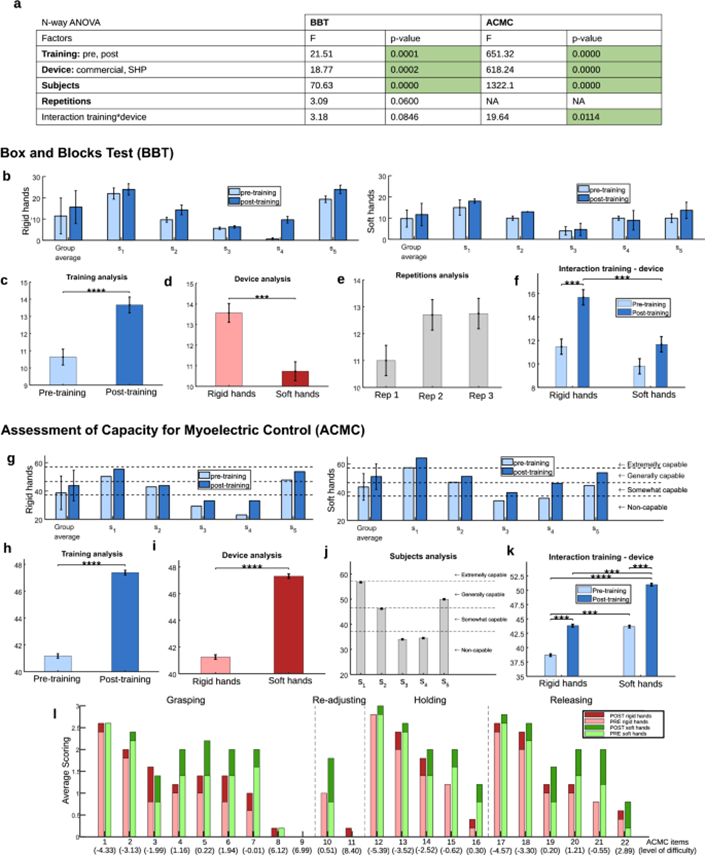
ACMC 包括更多功能性任务和不同类型的抓握,用于操作各种对象。从 ACMC 结果中提取的数据如图 2g-l 所示。图 2g 显示了对所有受试者和两种设备进行训练后 ACMC 分数的总体改进。训练前和训练后,僵硬手的平均值分别为 38.68 ± 11.90 和 43.82 ± 10.74。同样,软手得分的平均值为 43.66 ± 9.43 和 50.96 ± 9.08。图 2a 报告了 ACMC 测试的统计结果,在培训、设备和科目中具有重要意义。因素分析证明了训练的积极作用(图 2h),得分为 41.17(训练前)和 46.98(训练后)。图 2i 中的结果显示了柔软手感更好的性能,分别为 41.25(刚性)和 46.90(柔软)。图 2j 证明了参与者的不同能力,没有人被认为在 ACMC 的临床解释方面非常有能力,这加强了他们在肌电控制方面的非专家条件。他们的表现趋势对应于在 BBT 分数中观察到的表现,如图 2b 所示。图 2k 中的交互测试证明了双手属性(刚性和软性)的学习水平相似,但软手具有更高的起始功能。请注意,训练后僵硬手的分数与训练前软手的分数没有显着差异。对 ACMC 22 个项目的个人评分的分析允许从该测试中提取额外的信息。图 2l 报告了每个实验条件下每个项目的平均分数。即使在学习中存在一般一致性(见图 2k),也可以观察到与假肢特性相关的训练效果,具体取决于项目。每个系统的训练条件之间的差异证明了在训练期间学习较大的项目。我们在中等难度的项目中观察到更大的学习。其中,僵硬的手偏爱( + 0.5分)的学习:3—精准抓握,无支撑,6—抓握时机。另一方面,软手有利于( + 0.5分)的学习:3-精确抓握,无支撑,4-适当的握力,5-不同位置的抓握,6-抓握时机,10-重复抓握和释放, 14-保持运动,19-在不同位置释放,20-释放时间,21-协调双手释放和22-释放无视觉反馈。
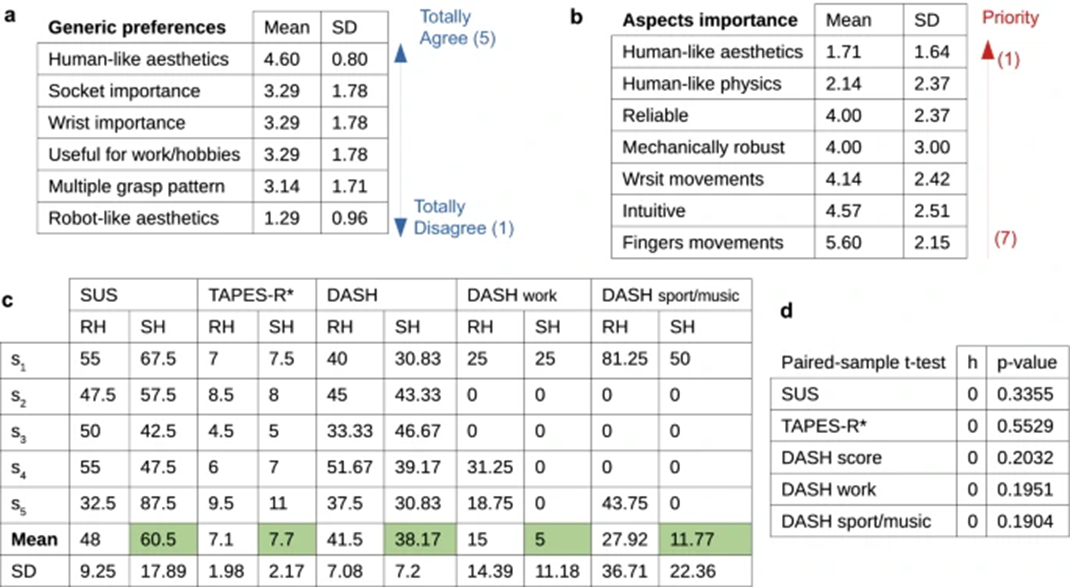
用户感知图 3a 显示了先入之见,图 3b 显示了参与者的优先级。对于通用偏好,参与者不同意机器人式美学设计,而几乎都同意类人美学的重要性。同样,对于理想设备而言,类人美学和类人物理是具有更高优先级的方面。独立手指运动的优先级最低,这可能与非专业肌电用户的状况不佳有关。训练后调查的结果如图 3c 所示。对于 SUS 和 TAPES-R* 测试,分数越高表示设备的可接受性和满意度越好。柔软的手获得了更好的性能,SUS 的平均得分为 60.5 ± 17.89,TAPES-R* 的平均得分为 7.7 ± 2.17。后者接近于僵硬的手得到的分数,等于7.1 ± 1.98。在 DASH 测试中,较低的分数对应于较高的感知功能,因为范围从“没有感知困难”(最低)到“无法执行任务”(最高)。如图 3d 所示,DASH 分数表明软手具有更高的感知功能(38.17 ± 7.2)。该测试提供了两个可选部分,重点是在工作条件和爱好方面的能力。在那里,与刚性手相比,柔软的手被认为具有相似或更好的功能,对于这些子部分,其得分分别为 5 ± 11.18 和 11.77 ± 22.36。尽管平均值偏向于柔软的特性,但在配对样本 t 检验之后,调查之间没有发现统计学上显着的偏差(图 3d)。由于受试者间的可变性,需要更大的参与者样本来进一步探索用户感知偏好。
实施评估该协议评估了描述体现感的三个主要组成部分:(a)自我定位,(b)代理感和(c)身体所有权。自我定位测试评估每个设备的物理感知。图 4 显示了截肢受试者的结果,其中获得的健康手模型(见图 4a)与文献中类似的低估[M = −27.9%]。然而,对两种假肢装置的分析表明,对缺失的手的低估程度更高。结果证明软手的重建效果更好,仅在健康手和僵硬手之间具有统计学显着差异。我们还评估了手指长度绝对值的差异,如图 4b 所示,其中健康手的身体模型与两种假肢有显着差异。作者在 37 中观察到 3 组手指长度:拇指、食中指和无名指。从图 4c 中可以看出,中指的结果与拇指和小指明显不同,而食指和戒指处于中间位置,仍然与拇指不同。每只手的高估百分比如图 4d 所示(p = 0.6429)。健康手模型中从拇指到小指的手指长度越来越被低估。两种假肢系统出现相反的情况,相对于健康的手,僵硬的手有更大的差异。为了评估感知手宽度模型,计算了相邻指关节对之间的距离。结果显示出强烈的高估 [M = 68%],同时观察到拇指指关节的高估。相反,我们的结果(见图 4e)显示大多数段被低估,拇指指节的值最大。在预训练中观察到所有手宽度模型的相似值(图 4f),但结果表明训练后根据测试的假肢产生强烈影响(p = 0.0539)。为了评估整体手形,采用了 Napier 形状指数 37,该指数量化了其纵横比。文献中的结果显示宽度相对于长度被大量高估,实际约为 60,健康约为 150。假肢使用者的结果(图 4g,p = 0.3825)显示更大的实际指数,以及更低的感知健康的手、柔软和坚硬的手形指数(大约 115)。

代理意识测试包括运动认知双重任务。图 4j-m 显示了成功案例的动作(运动任务)的执行时间和计数哔哔声(认知任务)时的错误数量。对不同因素(假肢系统、训练前和训练后条件以及执行的运动任务)进行了 n 向方差分析,但没有发现统计学上的显着差异,可能是因为参与者数量有限。关于执行时间(p = 0.3443),图 4j 表明软手比刚性手执行得更快。图 4k 表示训练后的改进(p = 0.2831),图 4l 表示系统和训练之间的交互(p = 0.3704)。关于认知任务,图 4m 显示了计算每个操作任务的手之间的哔哔声数量时的错误(p = 0.1485)。虽然刚性手在移动罐头任务中获得较低的错误率,但软手在翻牌任务中表现出更高的多任务处理能力。身体所有权测试包括观察假肢在自发姿势中的使用。尽管 3 名受试者进行了 96 次口头描述,但只有一名用户对每个物体用假肢至少展示了一个手势。图 4n 中显示了最灵巧的用户的 32 项描述数据,包括训练前和训练后条件下的假肢系统。尽管两种设备之间没有明显的偏好,但结果显示治疗训练后的中值较低且变异性较小。
讨论功能评估证明,虽然僵硬的手在 BBT 中表现出更好的表现(图 2d),但柔软的手在 ACMC 中获得了更高的分数。在 BBT 中,代偿运动的减少可以促进软假肢,但一般来说,传统的刚性手可以更快地响应这项任务。相反,在 ACMC 中,根据抓握、握持和释放动作期间的临床观察,对手的功能进行了更广泛的评估,软手被证明是一种功能更强大的系统,对许多人来说,软手是商业硬手的有前途的替代品。原因与其适应性有关。进一步的研究指出了在执行代偿运动期间柔顺手腕在软假肢上的作用,这超出了本文的范围。如图 5a 所示,僵硬的手允许参与者实现更多重复和精确的抓握,只用两个指尖与块接触。事实上,即使没有显着性(图 2a),交互测试表明在 BBT 中用僵硬的手训练后有更大的改进(图 2f)。尽管如此,如图 5a 的照片序列中的肩部位置所暗示的那样,缺乏适应性导致对僵硬的手进行更大的补偿运动。相反,柔软度允许在抓握时与多个接触点进行交互,并增强更自然的身体姿势(见图 5a)。尽管如此,参与者在使用柔软的手时更多地依赖视觉反馈,这表明缺乏感官反馈可能会导致更高的把握不确定性。图 2g 显示了软手的平均 ACMC 得分更高,这可能是由于其对不同情况要求和对象的适应性。ACMC 结果表明,在使用刚性和软系统进行训练后(大约 7 分)都有一致的改进(图 2k)。图 5b 展示了一个使用软假肢和硬假肢进行衣服处理的对象。即使在实验者的鼓励下利用手部功能,受试者也仅将僵硬的手用作残肢的延伸,但积极地使用柔软的手来完成任务。此外,尽管刚性多关节商业手提供了在抓握模式之间切换的可能性,但我们在评估期间(甚至在训练后课程期间也没有)观察到任何有意选择不同手部配置的情况。如果它发生了,那是错误的并且扰乱了动作的流程。请注意,由于难以进行单独的肌肉收缩,非专业肌电用户在使用切换技术时可能会感到疲劳。受试者可能需要大量培训才能将此功能纳入他们的 ADL。在 ACMC 中,对每个项目的评分分析强调了在许多方面使用软手进行更大的学习(仅训练 4 小时后)。其中,第 4、10、14、20 和 22 项(图 2l)与设备的直观使用和可靠性有关。如图 5c-f 所示,软技术促进了更自然的姿势,从而提高了握持阶段的控制能力和抓握可靠性(图 5c-e)。一些参与者甚至在用软手握住主要物体的同时用对侧的手执行次要动作(图 5f-g),或者在执行任务时对说话充满信心(图 5h)。相反,图 5i-m 显示大多数参与者对使用刚性设备保持和移动物体没有信心。这个问题可能与掌握可靠性或控制技能差有关。尽管如此,具有更高控制专业知识的用户仍然可以提供可靠的保持,如图 5n 所示。第 5、19 和 21 项(图 2l)也呈现出在软性训练前和训练后条件之间更快的改善,与对侧手臂更自然的协调有关。我们在用柔软的手进行双手活动时观察到更灵巧的协调。由于 SHP 的柔软性和适应性(图 5o-t),用户可以体验到更安全、更直观的掌握。这在执行高级活动时很明显,例如关闭软袋(图 5o)或折叠衣服(图 5p-q)、精确动作(图 5r)或在没有支撑的情况下拿着易碎物品(图 5s-t) .在后者中,适当控制施加的力是动作成功的基础。相比之下,大多数参与者仅将刚性装置用作固定物体的牢固支撑(图 5u-w)。僵硬的手的适应性差可能会迫使手臂配置进入更不舒服的身体姿势(图 5x-z)。

鉴于参与者人数少且主题偏好之间存在差异,因此不可能从自我评估中得出具有统计意义的结论。尽管如此,柔软的手在 SUS 中对 3 名受试者达到了非常好的可接受性(图 3c),得分接近或高于 68(文献中考虑接受的设备的平均得分)。相反,商用刚性设备从未通过验收标准。在 TAPES-R* 中,刚性和软性设备在设计满意度方面达到了相当的分数,尽管 SHP 是一个正在开发的研究系统。正如 38 所建议的,TAPES-R 应该在满意度小节内包括两个子量表,一个用于美学,另一个用于功能方面。满意度的独特价值可能会误导有关这两个方面的信息,未来的研究应包括对美学的进一步调查。在 DASH 中,当参与者感知到假肢之间的功能差异时,软手获得较低的分数(更好的结果)。作者认为,参与者对软性的乐观态度与他们对小水电直觉使用、软交互和适应能力的欣赏有关。尽管软手在自我定位测试中与健康手模型更相似(图 4a),但软和刚性假肢装置在绝对值上获得了相似的手指长度(图 4b)。与 i-limb 相比,SHP 的较小尺寸可能影响了这一发现。关于假肢的桡尺骨效应,拇指在图 4d 中表现出最强的低估,特别是对于僵硬的手。这种误解可能会受到两种设备设计中缺乏对立(或手掌)的影响,使用户感觉拇指比人手更短、功能更差。图 4e 显示了与文献相比对拇指指关节的更大低估(heal你的科目)。这方面强化了先前的假设,即将这种误解与机器人拇指的设计或功能缺乏拟人化联系起来。我们观察到对图 4f 中的两种设计解决方案进行训练的相反效果。这种效果可能是由于刚性商用假手在横向方向上缺乏运动而发生的,这些假手通常被设计为仅支持手指屈曲/伸展,而忽略了人类手指内收/外展的能力。然而,SHP 的协同设计允许其手指的最小横向位移。这种设计差异可能会影响手宽模型的感知,并证明实验过程中相应假肢的实际可视化。最后,与文献一致,人手(即实际)和假肢装置(在图 4g 中用点划线标记)的纵横比显示手指比手宽大,而所有身体模型都比手宽宽度大于感知的手指长度。在代理感测试期间,刚性手的适应性差和需要补偿运动对运动任务的执行时间产生不利影响(图 4j)。使用图 4l 中的软手观察到的显着的训练后改进可能表明通过训练课程获得了更高的专业知识。图 6a-p 展示了一些最灵巧的参与者(主题 5)的身体所有权测试示例。图 6a 显示了手柔软的自然姿势,其中假肢成为用户身体形象的一部分。用户用他的两只手做手势主要表达大小(图 6b)或复杂的对象形状(图 6c)。仅当使用软手时,我们观察到系统包含非代表性手势(即用于强调单词的有节奏的手势和针对收件人的交互手势),即使在预训练条件下(图 6d),表明较高的初步主人翁意识。相反,图 6e、i 和 m 显示了在训练前和训练后条件下,软手和硬手如何将假肢放在腿上,阻止其包含在内。在这些情况下,参与者大多使用完整的手来支持物体的描述(图 6f、j 和 n),而仅对具有更高维度的物体使用双手(图 6g、h、k 和 o)。图 6l 和 p 分别显示用户用僵硬的手做手势来描述物体形状或进行非语言交流。尽管手势之间的区别超出了本研究的范围,但我们在这个灵巧的用户中观察到了 39 中定义的大多数表示,除了绘图。与我们的预期相反,对象 5 的图 4n 中的结果表明,在训练后条件下,这两种设备的手势频率较低,变异性较小,这可能与疲劳有关。手势通常代表个人运动体验,事实证明,在描述之前手动执行的动作时,说话者的手势更多40,41。非专业肌电用户的状况可能对参与者的手势率有很大影响。尽管由 39 设计的身体所有权测试提供了一种系统的方法,但作者认为,将训练中使用的物体包括在内可能有助于研究假肢中的这种效果。
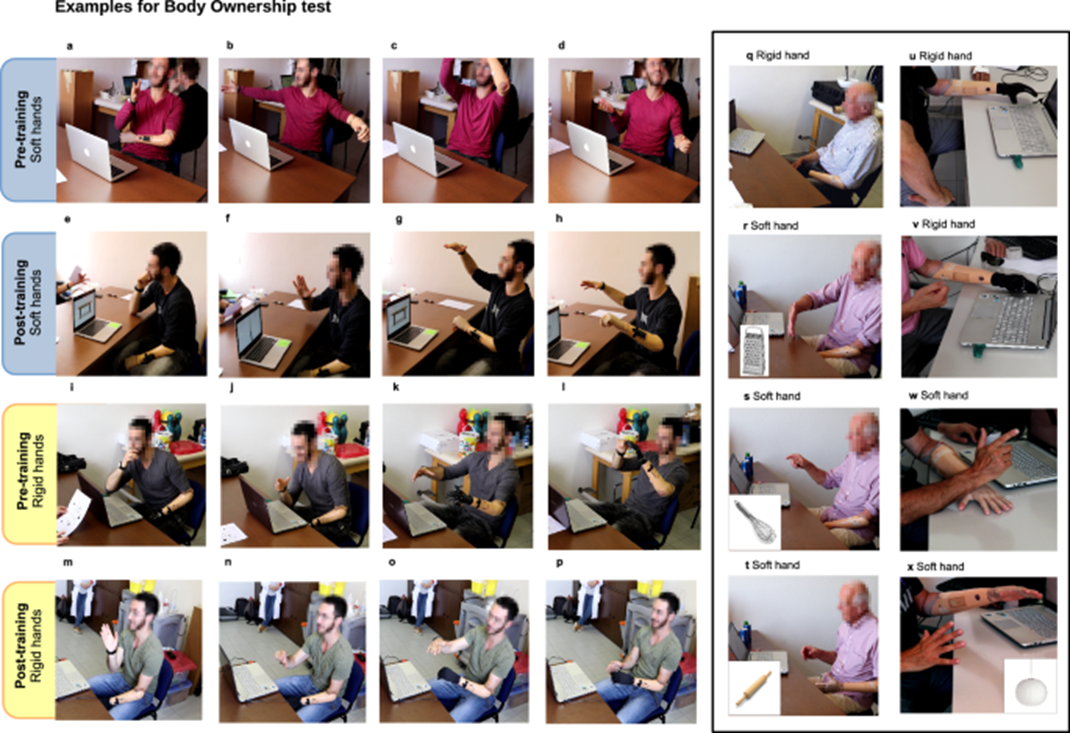
我们展示了对另外两名患者(受试者 4 和受试者 3)的一些有趣的轶事观察。虽然对象 4 从来没有用僵硬的手来支持物体的描述,但他偶尔会用柔软的手表现出一些动作。这可能与几个方面有关,例如重量或负担的差异,但它可能是假肢实施例的初步表现。如图 6q 所示,受试者并不经常使用完整的手进行交流,只有在实验者提出关于物体大小(图 6r:磨丝器——可操作物体)或物体的具体问题后,他才会这样做难以用语言描述(图 6s:Whisk——可操作的物体)。在用软手测试期间,用户自发地用双手描述了一个经常执行的动作(图 6t:擀面杖——可操作的物体),持续 5.33 秒。这些观察得到了受试者 3 的经验的支持。参与者也没有使用僵硬的手来支持物体的描述,并且在整个测试过程中将设备保持在静止位置(在桌子上)(图 6u)。受试者在实验过程中只移动了完整的手,但有时我们观察到 i-肢体抓握模式的无意识变化(例如在图 6v 中)。控制系统的困难可能会阻碍其自发使用。在第一天使用柔软的手时,用户不仅在他的姿势(图 6w)而且在他的肢体语言中加入了假肢来描述灯泡的形状(图 6x - 不可操纵)3.77 秒。
 fill=%23FFFFFF%3E%3Crect x=249 y=126 width=1 height=1%3E%3C/rect%3E%3C/g%3E%3C/g%3E%3C/svg%3E)
总体而言,实施例评估的结果表明,当使用柔软的手时,身体模型表示更接近现实,并且有更多的自发手势。此外,结果表明软手比刚性手具有更高的多任务处理能力。这些初步观察表明柔软特性的更高体现,并鼓励未来对此问题进行调查。
服务联系电话:17737500878
郑重声明:部分文章来源于网络,仅作为参考,如果网站中图片和文字侵犯了您的版权,请联系我们处理!
标签:
上一篇:学术分享:假肢手的综述(1)
下一篇:仿生假肢手构型设计及性能评测

 假肢新闻
假肢新闻 企业新闻
企业新闻 康复知识
康复知识 假肢公司
假肢公司 公益活动
公益活动 产品展示
产品展示 案例展示
案例展示 假肢问答
假肢问答 网站首页
网站首页



