
 假肢新闻
假肢新闻 企业新闻
企业新闻 康复知识
康复知识 假肢公司
假肢公司 公益活动
公益活动 产品展示
产品展示 案例展示
案例展示 假肢问答
假肢问答 网站首页
网站首页操作感知一体化的软体神经假肢手!来自上海交大机器人研究所
对于世界上超过 500 万前臂截肢患者来说,为了最大程度上恢复手的功能,穿戴假肢就成了患者的一个选择,患者通过假肢来恢复前臂以及部分手功能。
在康复阶段,患者会接触到不同的假肢类型。其中包括美容假肢以及肌电控制假肢。美容假肢不具备实际的控制能力,仅在外观上与人手相似,而具备控制和反馈的肌电假肢是以人体肌肉电信号为控制源的新型假肢,也是最近几十年来学界研究的热点。
虽然肌电假肢可以实现患者原先手臂的部分功能,但传统的肌电假肢仍然不能等同于人的自然肢体,患者控制肌电假肢的方式,也不同于控制正常的自然肢体。
目前,已经有越来越多的商业公司,通过在假肢表面贴电极以捕捉肌电信号,并将其用于对患者控制意图的识别,继而将识别出的意图转化为控制信号,进而完成对假肢的灵巧控制。
而这种灵巧性的代价是复杂的机械结构和驱动电机系统,给患者随身佩戴带来不便(超过400 克)。此外,其高昂的价格(超过 10000 美元)也给患者带来了沉重的经济负担。
近日,上海交通大学(SJTU)的朱向阳,谷国迎教授和美国麻省理工学院(MIT)赵选贺教授合作,设计了一种灵巧、轻便和低成本(低于500美元)的软体神经假肢手。
研究团队对佩戴这款新型假肢的患者的日常活动进行了研究,佩戴这款假肢可以实现握蛋糕、拉拉链、倒果汁、搭积木、撸猫等日常活动。同传统刚性假肢相比,这款假肢在速度、灵巧性以及柔软易碎物品抓握方面具有优势。
该研究发表在 Nature Biomedical Engineering ,题为《操作感知一体化的软体神经假肢手》(A soft neuroprosthetic hand providing simultaneous myoelectric control and tactile feedback)。
设计灵感
软体机器人是当前机器人学科和多学科交叉领域的研究热点,突破了传统机器人的设计、制造、建模与控制方法。由于软体机器人固有的柔顺、变形、智能特性,其在医疗健康、可穿戴设备、深海勘探等诸多领域呈现出巨大的应用前景。
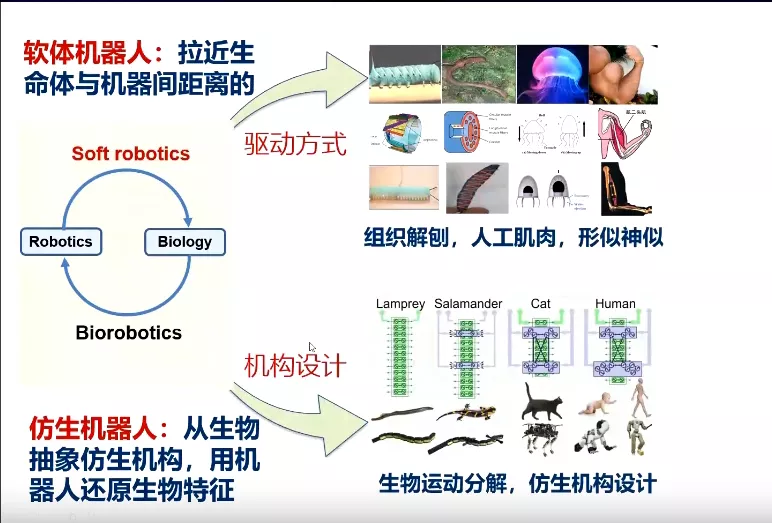
图 | 软体机器人在多个领域的巨大应用潜力(来源:受访者)
上海交通大学机器人所是国内较早从事软体机器人领域研究的机构之一。研究团队认为软体机器人技术将类生物体皮肤、肌肉的顺应性与轻质弹性部件的简单设计制造相结合,恰好为未来肌电假肢发展开辟一条有前途的道路,这也为这项工作提供了研究思路。
图 | 软体夹持手(来源:受访者)
软体神经假肢手的结构和工作原理
在结构上,每个手指具有内嵌多段分布式硬质结构层的纤维增强软体结构,仿生了人手关节-骨骼解剖形态。
五个软体手指和 3D 打印的手掌骨架相连接,手指和手掌都覆盖了一层弹性体层,以模仿人手的皮肤。四个定制的肌电传感器安装在假肢接收腔中,记录残肢目标肌肉的表面肌电信号,以实现对截肢受试者运动意图的快速解码。解码后的运动意图将用于控制气动系统驱动软体手指形成相应的抓握手势类型。
图 | 基于软体材料的假肢手指可自由弯曲( 来源:Nature Biomedical Engineering)
在运动上,该软体神经假肢手具有六个主动运动自由度,这些自由度包括:五个软体手指的弯曲运动以及拇指环转运动。此外,手指固有的柔顺性赋予了假肢的被动顺应性,使其即使在面对柔软、易碎物体时也能够进行自适应抓握。
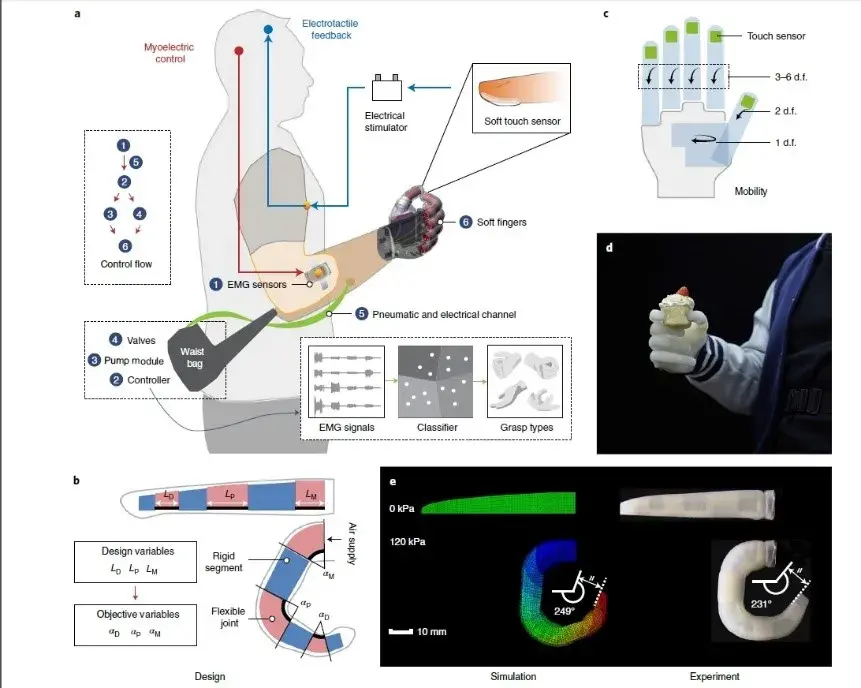 打开凤凰新闻,查看更多高清图片
打开凤凰新闻,查看更多高清图片图 | 新型软体假肢的设计( 来源:Nature Biomedical Engineering)
同时,为了感应软体神经假肢手施加在物体上的触觉压力,假肢手指尖上还配备了水凝胶-弹性体混合结构的柔性压力传感器。该传感器类似一个电容器:假肢手指尖接触物体时,接触压力增加,弹性体层厚度减小,电容器电容升高。
因此通过测量电容变化量获得触觉压力的信息。继而,触觉压力的信息可用于控制电刺激器,电刺激器通过布置在残肢上臂的刺激电极输出脉冲,反馈给患者相应的触觉压力。患者可以根据触觉压力反馈的刺激形式的差异来改变肌电信号从而改变假肢的抓握类型。总的来说,肌电传感器、触觉压力传感器和电刺激器的集成使截肢患者实现了对软体神经假肢手的双向闭环控制。
新型软体神经假肢手的操控能力
截肢患者最终的康复目的是为了灵巧地操控假肢,但完成其灵巧操控需要进行大量的控制训练。在本研究中,截肢患者只需 15 分钟就可适应软体神经假肢手。
当完成基本的适应性训练后,截肢患者按照任务指令进行一系列标准量化测试,以展示假肢的灵巧性和输出力。这些任务包括书的翻页、写字、举起重球等。研究团队表明这款软体肌电假肢在速度和灵活性方面优于传统的刚性肌电假肢。

图 | 软体肌电假肢的性能( 来源:Nature Biomedical Engineering)
当抓握柔软、易碎物品(例如草莓、面包和纸杯)时,软体神经假肢手的优势更加明显。日常生活应用验证实验表明,截肢受试者可以直接控制软体神经假肢手抓取和操作不同的物品(包括食物、日用品、工具等),也以帮助截肢受试者与外界进行安全互动(包括握手、撸猫等),完成精细操作(捏取不同形状尺寸的物体并将它们插入对应插槽)等。

图 | 视觉和听觉隔离的患者佩戴肌电假肢后可恢复一定程度上的触觉( 来源:Nature Biomedical Engineering)
该研究工作为下一代柔顺、轻便、低成本的类生物体假肢技术的发展提供了新的思路和方法。目前,研究团队已为该设计申请了专利,并正在尝试改进其传感能力和运动性能。后续,还会设计更好的肌电解码技术、更高密度的肌电电极阵列和更紧凑的气动结构来改进软体神经假肢。对于低收入家庭的截肢患者而言,这种类型的假肢具有低成本的优势,有望实现商业化批量生产,这样一来就可以将软体机器人技术造福于社会,给患者带来福祉。
论文研究工作得到了国家自然科学基金、上海市科委“科技创新行动计划”等科技计划项目的支持。该论文也被 Nature 以 “A tough prosthetic hand obeys the muscles’ commands” 为题,作为研究亮点报道。
服务联系电话:17737500878
标签:
上一篇:小男孩在幼儿园大方向同学展示假肢,母亲:会努力赚钱,鼓励孩子乐观向上1996年,17岁章子怡穿着白色肚兜的照片,脸上带着少女的娇憨




